Architecture: |
NX32L |
Device support: |
All |
Firmware version: |
1.52.00 |
hsioEncoderEnable configures and enables monitoring of an incremental encoder.
If the Z input is provided, it can be used to improve the positioning.
The encoder must be using quadrature encoding, where each step consists of four phases:
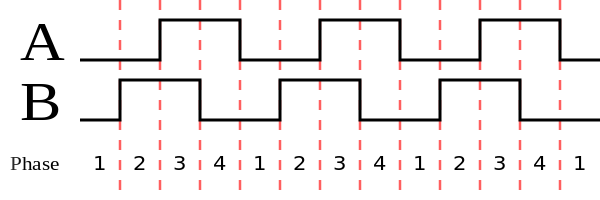
By examining the signals, it is possible to determine which direction the encoder is being moved and for how many steps, making it possible to determine the position.
When the Z-input is asserted while the encoder uses a mode that uses the Z-input, it will be registered and the position will be updated when the next step starts.
Note: Digital input 6-8 on the RTCU LX4 can not be used for encoders.
Input:
a : PTR
Address of the digital input signal to use as A (please see the example below).
b : PTR
Address of the digital input signal to use as B (please see the example below).
z : PTR
Address of the optional digital input signal to use as Z (please see the example below).
id : INT (1..2) default 1
Identifier of the encoder to configure.
mode : INT (0..3) default 0
The mode to use for handling the Z signal.
0 |
- |
Z is not handled. |
1 |
- |
Reset on every Z. Every time Z is observed, the position is reset to 0. This is useful if Z is only active once during the entire movement, e.g. a rotary encoder that rotates 360 degrees or less. |
2 |
- |
Reset on first Z. The position will be reset to 0 the next time z is observed. This can e.g. be used in combination with an end-stop to zero the position. |
3 |
- |
Calibrate the position on every Z. This will set the position to the nearest multiple of the number of steps provided, every time Z is asserted. This will make sure that a few lost steps does not accumulate across multiple rotations of a rotary encoder. |
steps : INT default 0
The number of steps on a full rotation. Only needed in mode 3.
Returns: INT
1 |
- Success |
0 |
- Function is not supported. |
-1 |
- Unspecified error. |
-2 |
- Invalid signal provided. This can only be used on on-board high speed input signals. |
-3 |
- Invalid mode. |
-4 |
- The mode requires that steps has a valid value. |
-5 |
- Invalid ID. |
-6 |
- The encoder is already in use. Disable it first with hsioEncoderDisable. |
Declaration:
FUNCTION hsioEncoderEnable : INT;
VAR_INPUT
a : PTR;
b : PTR;
z : PTR;
id : INT := 1;
mode : INT := 0;
steps : INT := 0;
END_VAR;
Example:
INCLUDE rtcu.inc
VAR_INPUT
a : BOOL;
b : BOOL;
z : BOOL;
END_VAR;
PROGRAM test;
BEGIN
...
// Enable encoder
hsioEncoderEnable(id := 1, a := ADDR(a), b := ADDR(b), z := ADDR(z), mode := 3, steps := 200);
...
END;
END_PROGRAM;