Architecture: |
NX32, NX32L |
Device support: |
MX2 turbo LTE UDR, NX-200 DR |
Firmware version: |
5.13 / 1.74.00 |
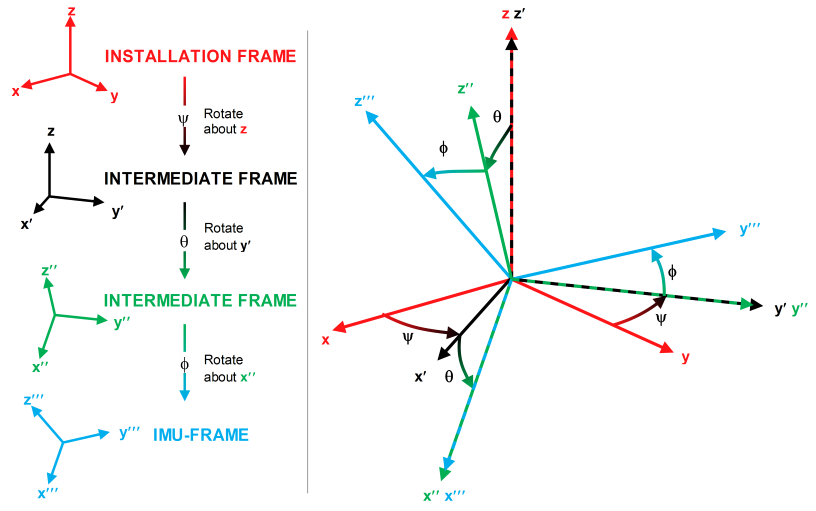
This configures the alignment between the Device Frame and the Vehicle Frame.
The alignment are the Euler angles required to rotate the Vehicle Frame to the Device Frame. The yaw rotation should be performed first, then the pitch and finally the roll. At each stage, the rotation is around the appropriate axis of the transformed Vehicle Frame, meaning that the order of the rotation sequence is important (see figure below).
The Device Frame is a right-handed 3D Cartesian frame connected to the RTCU device.
The x-axis points towards the back of the device (where the connectors and antenna connectors are present), the y-axis points towards the left of the device and the z-axis points up.
It is centered on the RTCU device.
The Vehicle Frame is a right-handed 3D Cartesian frame connected to the vehicle.
The x-axis points towards the front of the vehicle, the y-axis points towards the left of the vehicle and the z-axis completes the right-handed reference system by pointing up.
It is centered on the RTCU device.
Input:
automatic : BOOL (Default TRUE)
If true, the calibration is done automatically.
If false, the provided values are used.
yaw: DINT (0..36000)
The module mount yaw angle in 1/100°.
pitch: INT (-9000..9000)
The module mount pitch angle in 1/100°.
roll: INT (0..18000)
The module mount roll angle in 1/100°.
Returns:
1 |
- Success |
0 |
- Unsupported |
-1 |
- Invalid input. |
-2 |
- Generic error |
-3 |
- GNSS power is OFF |
Declaration:
FUNCTION gnssDRAlignSetup : INT;
VAR_INPUT
yaw : INT;
pitch : INT;
roll : INT;
automatic : BOOL := TRUE;
END_VAR;
Example:
INCLUDE rtcu.inc
PROGRAM test;
BEGIN
...
// Set yaw to 10.5°, pitch to 13.5° and roll to 5.4°.
gnssDRAlignSetup(automatic:=FALSE, yaw := 1050, pitch := 1350, roll := 540);
...
END;
END_PROGRAM;